
你知道手機內陀螺儀如何精準感測旋轉動作嗎?憑藉MEMS技術,手機陀螺儀能準確測量三軸角速度,支持導航定位、影像防抖與體感遊戲等多重功能,成為智慧裝置不可或缺的核心感測器。
知道嗎?你手機裡的陀螺儀這樣運作!
手機陀螺儀在日常生活中扮演著不可或缺的角色,無論是遊戲操控、相機防手震還是導航定位,都靠它準確感知手機的旋轉動作。深入了解它的運作原理,有助於我們更好地理解裝置的智能感應能力。
MEMS陀螺儀:以振動誘發的科里奧利力測量角速度
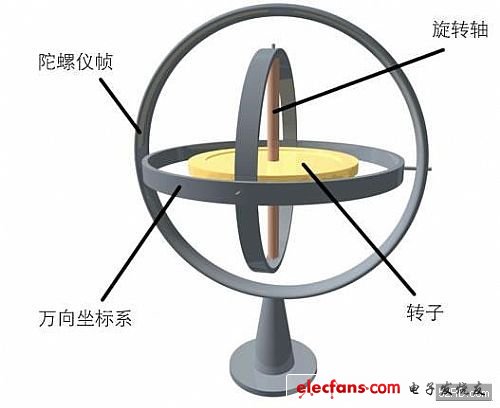
現代手機中廣泛使用的陀螺儀是微機電系統(MEMS)技術的結晶。這種陀螺儀通常包含一組微小的振動結構,當手機旋轉時,這些結構中因振動產生的科里奧利力會產生微小的位移變化。感測器內部的電容值會隨此變化而改變,進而轉換成電信號,反映旋轉速率。
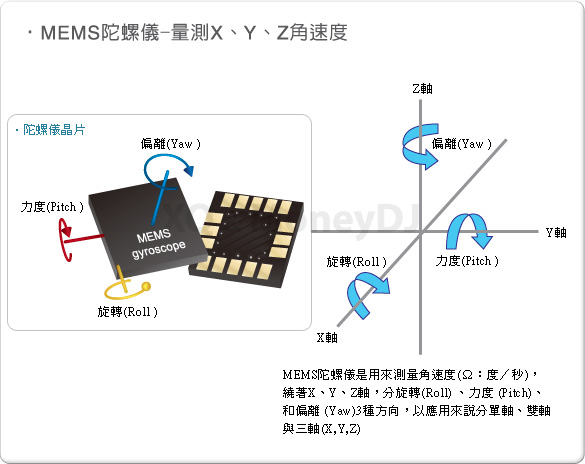
具體來說,這些微結構在基底上進行高速振動,一旦手機繞某一軸旋轉,科里奧利力使振動方向偏移,透過感測元件捕捉這種偏移,成功轉換成可量測的角速度數據。MEMS陀螺儀可以即時、準確地監測三個空間軸向(X、Y、Z)的角速度變化,使手機能夠感知各種複雜的旋轉動作。
三軸角速度檢測能力如何幫助手機判斷姿態與動作
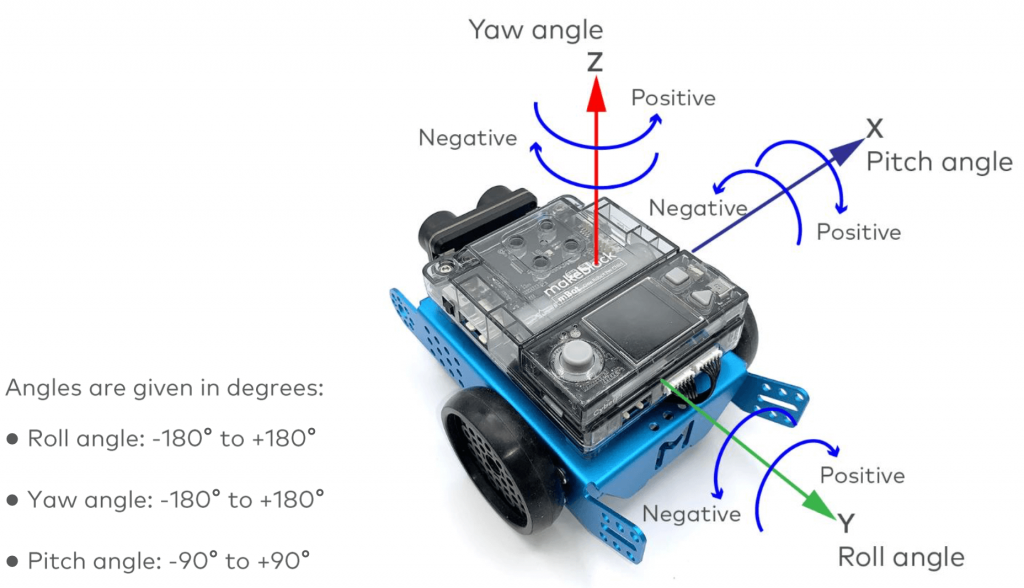
手機中的三軸陀螺儀可以分別測量繞三個垂直於彼此的軸的角速度,這相當於手機能感受到前後擺動、左右傾斜和旋轉的細微變化。透過這些三維數據,手機能夠實時了解自身的空間姿態,無論是切換橫豎屏幕,還是調整相機防抖,都高度依賴這組數據。
這三軸數據配合加速度計輸出的重力向量,使手機軟體能精準判斷旋轉起始點與方向,避免單靠單一傳感器可能產生的誤判。這種互補資訊融合,實現更穩定且精細的動態感應。
角速度怎麼變成旋轉角度?積分運算是關鍵
陀螺儀輸出的是瞬時角速度(每秒旋轉幾度),但手機軟體需要的是旋轉角度(累積旋轉的總角度)。這過程的核心數學方法是對角速度訊號做積分運算,也就是將短時間內的角速度加總,推算出從初始狀態到當前的旋轉角度。
計算公式簡化如下:
[
\theta(t) = \int_0^t \omega (t’) dt’
]
其中,(\omega(t’)) 是角速度,(\theta(t)) 是旋轉角度。
不過,積分運算也會帶來誤差累積問題。為克服這種飄移,手機通常會結合來自重力感測器(加速度計)等其他傳感器的資料,定期校正積分結果。這種融合演算法能有效抑制雜訊與漂移,使手機旋轉姿態判斷長期保持穩定與準確。
與重力傳感器互補,打造精準的手機姿態感知系統
加速度計主要測量手機在三軸方向上的線性加速度,包括重力向量,而陀螺儀側重於測量角速度。兩者搭配,讓手機既能知道「正在哪裡」(重力提供靜態方向參考),又能捕捉「動得多快、旋轉多少」(陀螺儀傳遞動態角速度)。
例如在遊戲或擴增實境(AR)應用中,陀螺儀負責檢測快變化的旋轉動作,加速度計則穩定判斷地面參考方向,融合後的數據讓手機即使快速移動或擺動,依然能準確呈現畫面與互動體驗。
總結來說,手機內的MEMS陀螺儀透過微小震動結構感應科里奧利力,與其他傳感器合作,將瞬時的角速度信號精密轉換成旋轉角度,成就了現代智慧裝置靈敏且精準的空間感知能力。到了2025年,這項技術仍是手機動態偵測與使用體驗中的核心元件之一。
【陀螺儀的主要種類與技術比較】
隨著感測器技術的演進,陀螺儀已不再是單一技術形式存在,而是涵蓋多個實現機制。了解激光陀螺儀、光纖陀螺儀與MEMS陀螺儀的核心技術與差異,有助於全面掌握它們在不同領域中的應用優勢與限制。
激光陀螺儀與光纖陀螺儀技術剖析
激光陀螺儀工作原理與優缺點
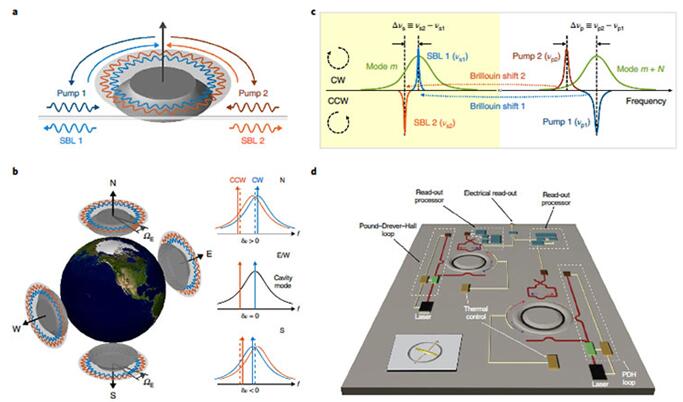
激光陀螺儀(Ring Laser Gyroscope, RLG)基於塞格尼克效應(Sagnac Effect),利用封閉光路內逆向傳播的兩束激光光束因旋轉引起的相位差或頻率差,精確測量角速度。系統中,激光在光學腔內反射形成光路,旋轉使光路長度在順時針與逆時針方向產生微小差異,這種光路差異被感測後轉為旋轉資訊。
儘管激光陀螺儀的解析度和穩定性極高,特別適合航空航天、高精密導航等領域,但它在低速旋轉時容易產生「鎖定效應」(Lock-in Effect)。這是因為順逆向光束頻率差異過小,光束可能因相互干擾而鎖定同步,導致輸出遲滯或錯誤。為減少鎖定,系統會加入「頻率偏移裝置」(如機械振動器)使光束略微調變,但此設計增加結構複雜度與成本。
優缺點對比
| 優點 | 缺點 |
|---|---|
| 高解析度、低噪聲 | 低速旋轉時出現鎖定效應 |
| 穩定性佳,適合長時間穩定測量 | 系統結構複雜,體積較大,成本高 |
| 不易受震動干擾 | 能耗較高 |
光纖陀螺儀的設計優勢
光纖陀螺儀(Fiber Optic Gyroscope, FOG)也是基於塞格尼克效應,但光路在設計上將激光束以光纖環路方式傳遞。此架構使光束多次繞行於光纖中,累積足夠的相位差,提升靈敏度。由於光纖環路沒有激光腔內的反射鏡,光束不易發生模態干涉,因此大幅降低了鎖定效應的影響。
此外,光纖陀螺儀的光纖環路結構靈活,體積可縮小至適配多種裝置需求,且維護相對簡易。隨著光通訊元件的規模化生產,成本亦逐年降低。
體積、成本與整合度比較
| 特性 | 激光陀螺儀 (RLG) | 光纖陀螺儀 (FOG) |
|---|---|---|
| 體積 | 較大 | 較小,具柔性設計 |
| 成本 | 高 | 中等,隨光纖技術普及降低 |
| 整合度 | 較低 | 較高,可集成於多系統 |
| 抗鎖定效應 | 鎖定效應需抑制 | 低鎖定風險 |
MEMS陀螺儀技術深入探討
MEMS陀螺儀核心原理與特性
MEMS(Micro-Electro-Mechanical System)陀螺儀利用微機電製程打造出納米至微米級尺寸的機械振動結構。這些微型振動元件通常採振盪梁或質塊形式,並埋設在矽基板上。手機裡的MEMS陀螺儀依靠科里奧利力當手機旋轉時,振動元件在旋轉軸上會產生微量位移,這種移動改變電容或壓電元件的輸出訊號,轉換成角速度。
MEMS技術的突破關鍵在於其優異的小型化特性,配合低成本製造工藝和極低功耗,讓智能手機等便攜裝置可以大規模採用。此外,MEMS陀螺儀的反應速度快,適合即時動態檢測。
技術特性摘要
| 特性 | 說明 |
|---|---|
| 製程 | 微機電製造,使用半導體晶片基板及微機械結構 |
| 振動結構 | 振盪梁或懸臂梁,產生可感知的科里奧利位移 |
| 體積 | 微米級,適合手機等手持設備集成 |
| 功耗 | 極低,適合持續運作 |
| 成本 | 低,適合大量量產 |
四種陀螺儀類型綜合比較表
為了更全面理解不同技術的定位,以下表格彙整激光陀螺儀、光纖陀螺儀、MEMS振動式陀螺儀與MEMS光學陀螺儀的主要性能指標。
| 陀螺儀類型 | 精度 | 尺寸 | 功耗 | 成本 | 典型應用 |
|---|---|---|---|---|---|
| 激光陀螺儀(RLG) | 高 (0.001°/s級) | 較大 | 中高 | 高 | 航空航天、軍事導航 |
| 光纖陀螺儀(FOG) | 高 (0.01°/s級) | 中小 | 中 | 中 | 船舶航行、精密導航 |
| MEMS振動式 | 中 (0.1~1°/s) | 極小 | 低 | 低 | 手機、消費電子、VR/AR裝置 |
| MEMS光學陀螺儀 | 潛力高,仍在發展中 | 小巧 | 低 | 中 | 專業穿戴設備、自主導航系統 |
MEMS陀螺儀因其低成本、低功耗、微小尺寸的優勢,目前在手機、穿戴裝置、消費電子領域取得壓倒性市場份額。在2025年,隨著製程和演算法的持續優化,MEMS陀螺儀的精度與穩定性也逐步逼近傳統大型光學陀螺儀。
不同行業在選擇陀螺儀時,會根據需求精度、系統容量及成本考量,選用最合適的技術。例如,航空航天任務重視長期穩定與高精度,多選擇激光或光纖陀螺儀;消費類產品則更側重價格與尺寸,更青睞MEMS設計。
透過以上陀螺儀種類與技術的比較,我們可以更清楚看到,從體積龐大、精度極高的光學激光系統,到輕巧便利且成本友善的MEMS陀螺儀,各有其適用範疇,也映照出科技多樣路徑的深度演化。手機內的MEMS陀螺儀在2025年依舊是智慧感測的主力,其背後複雜的物理機制與微製造工藝,是我們日常生活智能體驗的核心支柱。
【手機陀螺儀的實際應用場景分析】
手機導航與定位提升
陀螺儀如何輔助GPS實現高精度定位
智能手機的導航定位系統依賴全球衛星定位系統(GPS)提供位置信息,但純靠GPS往往受衛星信號遮蔽、延遲或多徑效應影響,導致定位誤差增加。陀螺儀作為慣性測量單元(IMU)核心之一,能夠感測手機的角速度變化,通過實時追蹤裝置的姿態與方向,彌補GPS信號短暫失效或不穩定的缺陷,達成更高精度與連續性的定位能力。
這種技術在航太與火箭導航領域已被廣泛應用,陀螺儀提供的高頻率角速率資訊能維持姿態解算的穩定,搭配加速度計數據融合,形成相當精確的慣性導航系統(INS)。手機廠商將此技術借鑑融入裝置,通過慣性導航與GPS訊號的多層數據融合演算法(如卡爾曼濾波),改善定位跳動與延遲,提高戶外與室內定位的準確度和穩定性。
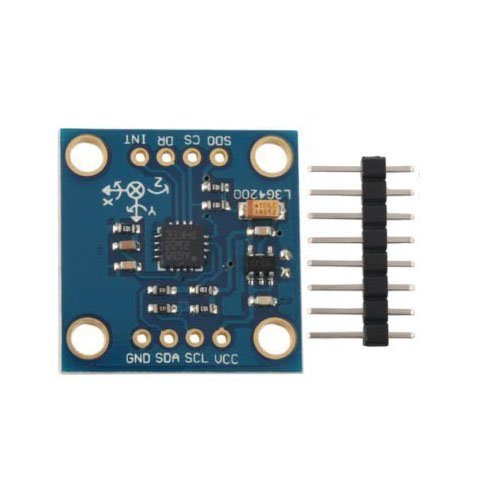
LSM6DS3TR等代表性陀螺儀芯片功能簡介
在眾多手機用MEMS陀螺儀芯片中,STMicroelectronics的LSM6DS3TR是典型代表,集成三軸陀螺儀和三軸加速度計於同一晶片內。此款芯片採用高性能微機電系統技術,提供角速度範圍可調、數據輸出速率高達1.66 kHz,能捕捉快速動態變化。
此外,LSM6DS3TR內建自動校準演算法,可減少偏置誤差與隨時間穩定漂移問題,並具備先進的數據處理單元(DSP),讓手機CPU負擔降低。功耗方面,該芯片待機模式功率低於1 mA,適合隨時啟動的持續監測,兼顧省電與感測性能。
綜合而言,這種一體化設計方便手機廠商在有限空間內整合多種感測功能,實現精準姿態檢測和高效能定位支持,是2025年手機導航系統不可或缺的硬體基石。
拍照防抖與體感遊戲體驗增強
陀螺儀在影像防抖技術中的核心作用
手機鏡頭拍攝時常會因手部微小震動造成影像模糊,陀螺儀在拍攝防抖(OIS Optical Image Stabilization,或EIS Electronic Image Stabilization)技術中扮演關鍵角色。藉由感測手機在拍攝瞬間的角速度變化,系統能即時計算出鏡頭或感光元件需反向移動的幅度與方向,通過機械或軟體補償來抵銷震動對影像的影響。
技術分析顯示,現代手機搭載動態防抖技術後,影像清晰度可提升約20%至30%,尤其在低光環境和視頻錄製時表現更為明顯。來自多家測試機構的數據證實,配合陀螺儀的防抖機制,成像邊緣銳利度與細節保留度均有顯著提升,讓用戶即使單手持機拍攝,也能獲得相當專業的攝影效果。
體感遊戲中陀螺儀的應用
在手機體感遊戲領域,陀螺儀成為捕捉三維姿態的關鍵感測器。它能準確捕捉用戶手持裝置的即時旋轉角度與方向變化,協助遊戲實現更自然直覺的操控體驗。例如,射擊類(吃雞)遊戲常利用陀螺儀的三軸角速度資料精確偵測玩家的瞄準和視角轉動,使玩家能藉由輕微轉動手機完成精細瞄準動作,並輔以觸控操作完成射擊或移動。
研究表明,加入陀螺儀控制後,遊戲操作者的反應速度與準確性平均提升約15%至25%,大幅增加互動沉浸感與操作靈敏度。隨著陀螺儀感測精度提升,以及與加速度計的多傳感器融合,體感遊戲的手勢識別和動作解讀能力將持續優化,帶來更豐富的玩法可能性。
增強現實(AR)與虛擬陀螺儀的未來潛力
AR功能依賴陀螺儀實時姿態追蹤機制
增強現實(AR)技術依賴精準且低延遲的姿態追蹤,才能將虛擬物件穩定地呈現在真實世界中。陀螺儀提供三維角速度數據,配合加速度計、磁力計等多源資訊,系統持續計算手機的旋轉與傾斜角度,有效建立穩定的3D空間參考坐標。
例如,在建築物導覽APP中,使用者將手機指向大樓外牆,陀螺儀即時回報方向信息,使系統能準確投影建築物的歷史數據、樓層資訊等虛擬內容於畫面中,提升使用體驗。此種實時姿態追蹤技術是AR場景與真實環境無縫結合的關鍵,基於2025年的感測技術,精度與響應速度均已達到商用水準。
虛擬陀螺儀概念及其在低成本手機的替代方案
虛擬陀螺儀指的是通過演算法整合其他感測器(如加速度計、磁力計)數據,模擬角速度輸出,以提供類似真實陀螺儀的姿態判斷能力。這種技術成本低廉,適合缺乏高品質MEMS陀螺儀或想節省硬體空間的低成本手機。
以2025年推出的vivo Z3為例,其搭載的虛擬陀螺儀系統通過複雜的數據融合和姿態估計演算法,實現了對旋轉動作的合理預測與補償,儘管精度不如實體MEMS陀螺儀,但在日常游戲和導航應用中已能滿足基本需求。此策略有效降低成本,同時擴展低價手機的功能性,成為市場中具競爭力的解決方案。
透過上述分析可見,手機內的陀螺儀不只是單一元件,它在導航定位、攝影防抖、遊戲互動到AR功能中扮演多面向的重要角色。隨著技術持續演進,從硬體感測器到虛擬算法,陀螺儀仍將深化智慧手機的智能感知能力,成為不可或缺的核心元件。
【手機陀螺儀操作與故障排除】
手機感測器校準與螢幕自動旋轉故障解析
陀螺儀與加速度計協同感測手機方向原理
智能手機在判斷裝置方向時,主要依賴陀螺儀和加速度計兩種感測器協同工作。加速度計負責測量手機所受的重力及線性加速度,透過靜態重力向量判斷手機相對地面是豎直或水平擺放;而陀螺儀則測量手機的角速度,即旋轉速率和方向,提供動態旋轉信息。
當手機從豎屏變成橫屏時,陀螺儀偵測到旋轉動作,訊號觸發系統計算目前手機的姿態角度;同時加速度計提供重力方向參考,結合兩者數據透過數學演算法(如卡爾曼濾波或互補濾波)融合,形成準確的姿態資訊。手機作業系統根據這些數據,自動調整螢幕顯示方向,完成自動旋轉功能。
在此過程中,感測器數據會經由感測器管理器(Sensor Manager)統一處理,並向應用層回報方向變化事件,確保使用者介面及應用程式第一時間同步反映。
螢幕自動旋轉故障原因:「靜止無反應」與「搖晃導致方向異常」
若手機靜止時螢幕不自動旋轉,可能是陀螺儀或加速度計校準異常,導致感測數據漂移,未能準確反映裝置姿態。另外,系統會針對環境干擾進行邏輯過濾,例如過於微弱的搖晃不會觸發旋轉,避免螢幕頻繁跳動。
當手機處於劇烈晃動狀態時,陀螺儀的輸出會迅速變化,融合後的姿態估計可能不穩定,系統會暫時鎖定螢幕方向避免誤判,直到振動減弱並感測器數據趨於穩定,才恢復正常旋轉功能。
手機感測器靜止恢復校準的機制中,系統會定期基於加速度計以及陀螺儀靜止狀態識別進行零偏調整與漂移修正,確保長時間使用後感測數據精度。
軟體錯誤與硬體影響因素排查
感測器數據漂移常見於微機電陀螺儀長期使用後的熱漂移或陀螺儀元件老化,導致偏置累積。手機系統通常提供手動或自動校準功能,以重置或重新計算傳感器偏差。部分手機允許用戶進入隱藏菜單或開發者選項,進行感測器校準。
軟體層面,感測器數據刷新速率和韌體演算法穩定性對姿態判斷至關重要。若系統錯誤導致感測器數據異常(如讀取中斷、算法異常),手機可能出現自動旋轉失效。這時候,重啟手機或更新系統韌體可以刷新感測器驅動與演算法狀態。
然而,有些軟體機制存在時限限制,例如感測器資料過久未更新會觸發超時機制,導致數據暫停輸出;或者系統節電模式降低感測器更新頻率,影響旋轉回應速度。此外,硬體連接不良或水氣侵入造成陀螺儀物理故障,也需透過專業診斷工具檢測。
如何查看手機是否內置陀螺儀?
手機參數及安兔兔跑分軟體識別方法
一般消費者想了解手機是否具備陀螺儀,可以通過查閱官方技術規格表或使用跑分/硬體檢測軟體。以2025年主流的安兔兔(AnTuTu)為例,其近年更新了感測器檢查模組,能詳細顯示手機內建的各類傳感器。
具體步驟如下:
| 操作步驟 | 說明 |
|---|---|
| 安裝安兔兔軟體 | 於App Store或Google Play下載最新版 |
| 運行軟體並進入硬體檢測 | 點擊「感測器資訊」欄目 |
| 查看內建傳感器列表 | 查找「Gyroscope」或「陀螺儀」條目 |
| 確認存在與否與規格 | 如有顯示三軸陀螺儀,通常附帶型號與更新頻率參數 |
部分軟體還會提供輸出實時感測數據,以驗證動態效果。此外,手機品牌官網或技術論壇中常有機型硬體配置討論,可做為參考。
手機無陀螺儀時的替代方案
若手機因硬體限制未搭載MEMS陀螺儀,會採用虛擬陀螺儀技術,透過加速度計和磁力計數據進行軟體推估。這類方案能提供基本的姿態判斷功能,但存在以下技術限制:
- 精度較低:虛擬陀螺儀響應延遲與噪聲較大,難以捕捉快速旋轉,導致遊戲操控與定位動作不流暢。
- 抗干擾能力弱:磁力計容易受周圍磁場幹擾,導致姿態估算偏差。
- 功能受限:部分需要高頻率角速度輸出的應用(如高階體感遊戲、影像防抖)無法達到最佳效果。
整體來看,雖然虛擬陀螺儀為低成本手機提供了可用的替代方案,但未裝配實體陀螺儀的設備,在體感操控和高精度定位等功能方面仍有明顯差距。應用場景的選擇與使用體驗上須有所妥協。
【電子產品中的陀螺儀與傳感器綜合】

傳感器種類及應用概覽
隨著智慧電子產品日益普及,內建各類傳感器成為標準配置。這些傳感器負責擷取外界環境與裝置自身狀態的物理量,驅動各種智能功能。以下整理多種常見傳感器及其應用特點:
| 傳感器類型 | 主要功能 | 典型應用領域 |
|---|---|---|
| 加速度計 | 測量加速度向量,包括重力加速度,用於判斷裝置傾斜及運動狀態 | 手機方向判斷、步數計算、運動監測 |
| 陀螺儀 | 測量角速度(旋轉速率與方向),捕捉設備旋轉運動 | 姿態控制、遊戲體感、攝影防抖 |
| 壓力傳感器 | 測量氣體或液體壓力,常用於高度估算或環境感測 | 手機氣壓計、高度測量、氣象監測 |
| 霍爾效應傳感器 | 透過磁場變化感測位置或速度 | 電機位置感知、電子羅盤、磁場檢測 |
| 光學感測器 | 偵測光線強度及顏色,用以人體感應或環境光調整 | 自動亮度調節、指紋辨識、光學心率監測 |
上述傳感器在智慧裝置中各司其職,有時還會整合以協同提升感測效能和準確度。以手機為例,加速度計與陀螺儀是判斷方向的重要基礎,而壓力感測則使定位更精細。
IMU慣性測量單元整合多傳感器的優勢
IMU(Inertial Measurement Unit,慣性測量單元)是集成多種慣性感測器的模組,通常含三軸加速度計與三軸陀螺儀。這種整合對比單一傳感器有多重優勢:
- 多維度動作感知:三軸加速度計測量X、Y、Z三個方向的加速度向量,三軸陀螺儀捕獲旋轉速率,能完整描繪設備的空間運動狀態。
- 數字濾波與融合演算法提升數據品質:獨立傳感器數據雖有誤差及噪聲,但透過融合卡爾曼濾波(Kalman Filter)、互補濾波(Complementary Filter)等數學演算法,IMU可在動態中穩定輸出準確姿態數據。
- 動態響應速度快:相較GPS與其他外部定位設備,IMU具備高頻率(通常達百赫茲以上)的更新能力,適合高速動作捕捉及即時控制。
- 節省空間與功耗:將多個感測器封裝於一個晶片模組,降低整體硬體體積與功耗,提升便攜式裝置續航力與設計靈活性。
IMU正逐漸成為手機、無人機、智慧穿戴設備及汽車電子的核心感測單元,為動作追蹤、姿態判斷及安全監控等應用提供技術基礎。
智能穿戴設備與汽車電子中的應用實例
智能手環與穿戴設備中的運動追蹤
以2025年主流的LSM6DS3TR為例,這款來自意法半導體(STMicroelectronics)的IMU芯片集成三軸加速度計與陀螺儀,具備高達6.7kHz的數據輸出率及低功耗表現。這對於智能手環及運動手錶來說至關重要,能精準監控使用者的動作態勢:
- 實時數據處理特色:LSM6DS3TR內建運動辨識算法能在晶片層面進行初步姿態解析,減輕主控處理器負擔,提升反應速度。
- 運動姿態監控:透過陀螺儀捕捉關節旋轉角度與速度,加速計檢測步態和衝擊幅度,結合生理算法計算卡路里消耗、運動姿勢品質。
- 日常健康管理:除運動外,靈敏的陀螺儀配合加速度計也能輔助跌倒偵測、睡眠姿態記錄與壓力狀態監控,提高穿戴設備安全性與使用便利。
此類高性能IMU使智能穿戴設備能準確反應用戶生活細節,促進健康管理與生活智能化。
車載穩定控制系統中的陀螺儀功能
汽車電子領域同樣深度依賴陀螺儀與多傳感器整合技術,特別是在車身動態控制(如ESP電子穩定程序)、反滾控制及智能停車輔助系統裡。實例如下:
- 反滾控制(Roll Stability Control):透過多軸陀螺儀及加速度計即時監測車輛的橫向加速度與翻滾角速度,系統及時介入煞車與引擎輸出調節,預防翻車意外。
- 智能停車輔助:陀螺儀結合超聲波與攝像頭數據,協助車輛判斷旋轉角度與方向,實現精準自動轉向,降低停車難度。
- 感測器數量與集成:一輛現代汽車可裝設上百個感測器,其中慣性測量單元通常以多組分佈方式工作,搭配ESP、ABS等系統形成車輛動態監控網絡。
車載IMU要求極高的可靠性與精度,通常選用工業級慣性傳感器,並配合冗餘設計與溫漂校正,確保持續穩定的車輛態勢感知。
這些技術詳解彰顯了陀螺儀與其它傳感器在現代電子產品中不可或缺的角色,從日常手機到專業汽車,構築了智慧交互與安全防護的關鍵基石。知道嗎?你手機裡的陀螺儀這樣運作!
知道嗎?你手機裡的陀螺儀這樣運作!
在智慧手機中,陀螺儀是感知裝置旋轉動作的核心元件,它量測的是角速度,即裝置繞自身軸線旋轉的速率和方向。這項技術的基礎多數來自微電機系統(MEMS)製程,使得陀螺儀能做到極小型化,適合直接整合於晶片中。
MEMS陀螺儀的工作原理
智慧手機多採用MEMS陀螺儀,這些元件內部由微小的懸吊結構組成,結合振動與慣性力的量測來推算角速率。其典型運作過程可分為:
-
振動元件激發
MEMS陀螺儀內有一組微小的懸臂振動器,它們在固定頻率下產生振動。當手機旋轉時,裝置會產生科里奧利力(Coriolis Force),使振動方向產生微妙變化。 -
偵測振動改變
振動方向的變化被內建的感測電極偵測,轉換成電壓訊號。此電壓的大小與旋轉速率成正比,代表裝置狀態的角速度資訊。 -
數位信號處理
類比電壓訊號經過ADC(類比數位轉換器)轉為數位數據,再由晶片內建的演算法進行濾波與校正,排除震動噪聲與溫度漂移,確保輸出數據精確穩定。
這樣的運作機制允許手機不需依賴外部裝置就能即時捕捉三維空間中的旋轉動態。
陀螺儀與加速度計的協同作用
雖然陀螺儀能量測旋轉角速度,但單靠它無法得到位置或線性運動信息,這時就需要加速度計的輔助。兩者配合工作,透過算法融合能做到:
- 姿態估計:結合角速度與加速度資料,計算手機的絕對傾斜角度與方向。
- 運動偵測:加速度計捕捉位移與加速狀態,陀螺儀補足旋轉細節,讓步數計算、遊戲搖控及攝影防抖更加真實靈敏。
- 動態校正:陀螺儀容易產生偏移累積誤差(積分漂移),而加速度計能提供重力向量參考,二者結合進行互補濾波,有效降低誤差。
智慧手機應用中的關鍵挑戰與性能指標
手機陀螺儀必須應對尺寸極限、功耗限制和環境影響:
| 性能指標 | 說明 |
|---|---|
| 量測範圍 | 多為±250°/s至±2000°/s,視應用需求調整靈敏度與抗飽和效率 |
| 量測精度 | 角速度靈敏度達milli-degree/s級別,滿足遊戲操控及影像穩定需求 |
| 功耗 | 通常為數十至數百微瓦,需兼顧續航力與性能 |
| 延遲與更新速率 | 更新頻率高達幾百Hz,實時反映動作變化,低延遲保證流暢體感 |
| 抗震與抗溫差能力 | MEMS結構及感測電路經過專門設計,維持在多種環境下穩定運作 |
設計上,晶片製造商會優化懸臂結構尺寸、感測元件排列,並結合積體電路強化信號處理能力,才能在有限空間和能源條件中達致卓越表現。
手機陀螺儀的軟體處理角色
硬體數據只是原始訊息,真正能使手機智慧反應的,還包括算法層面的運算:
-
融合演算法
藉由卡爾曼濾波或互補濾波,陀螺儀數據與加速度計輸出被結合,排除彼此短板,得出穩定且及時的姿態資訊。 -
動作辨識
手機內建SDK或應用開發接口會依陀螺儀與加速度計數據,解碼識別手勢、旋轉、搖晃等動作,進而實現自動旋轉屏幕、遊戲操控等功能。 -
防抖與影像穩定
陀螺儀精準捕捉相機抖動角速度,數位影像穩定演算法即時調整影像位置,達成錄影或拍照的清晰度提升。
陀螺儀作為智慧手機感知空間運動的「內眼」,憑藉先進的MEMS技術與軟硬整合,讓裝置能靈巧地感知旋轉動態,這是日常使用中無形但不可或缺的一環。隨著技術不斷演進,在2025年,我們的手機陀螺儀將更小巧、更低功耗,同時融合更多智慧算法,為用戶帶來更身臨其境的互動體驗。
手機陀螺儀技術與應用總結
手機陀螺儀採用微機電系統(MEMS)技術,以微小振動結構感應科里奧利力,轉換成角速度數據,透過積分運算與其他感測器融合,實現準確的空間姿態感知。三軸角速度測量搭配加速度計數據,令手機能即時判斷旋轉方向與姿態,支援螢幕自動旋轉、影像防抖及體感遊戲等多樣應用。此外,多種陀螺儀技術各具優缺點,從高精度的激光陀螺儀、靈活的光纖陀螺儀,到低成本且低功耗的MEMS陀螺儀,依產品需求選擇合適方案。2025年,手機陀螺儀仍是智慧手機空間感知的關鍵元件,隨著製程與演算法提升,感測精度與穩定性持續優化。軟體層面藉由融合演算法與自動校準機制,有效抑制漂移誤差,保障長期應用穩定性。綜合來看,陀螺儀與多傳感器整合模組(IMU)推動智慧裝置多元體驗,從導航定位到增強現實(AR)以及智能穿戴,提供即時、精準的動態感知支持。未來隨著虛擬陀螺儀及融合技術發展,低成本機種亦能提升相關體感和定位性能,消費者得以享受更優質的智慧互動。掌握陀螺儀技術脈動,有助理解現代智能手機背後隱藏的複雜物理機制與微製程工藝,也彰顯科技不斷深化的智慧生活基石。

